Uber-H3索引系统
Uber H3是Uber实现的一个基于正六边形,分层空间索引系统。
H3:
- 功能-世界分割成正六边形的网格
- 本质是一个分层网格系统
- 支持全球,把世界划分为平米级的网格
使用正二十面体投影
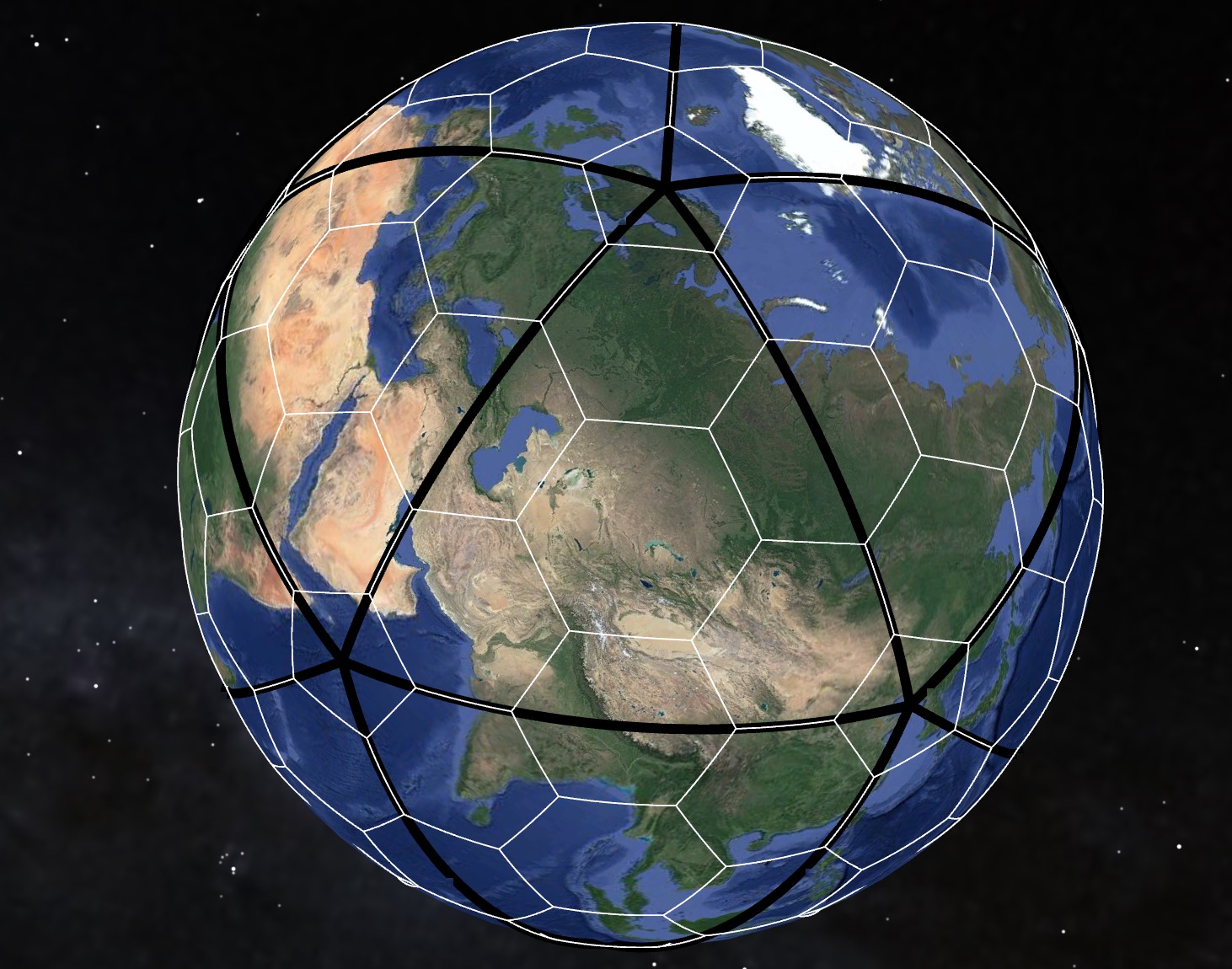
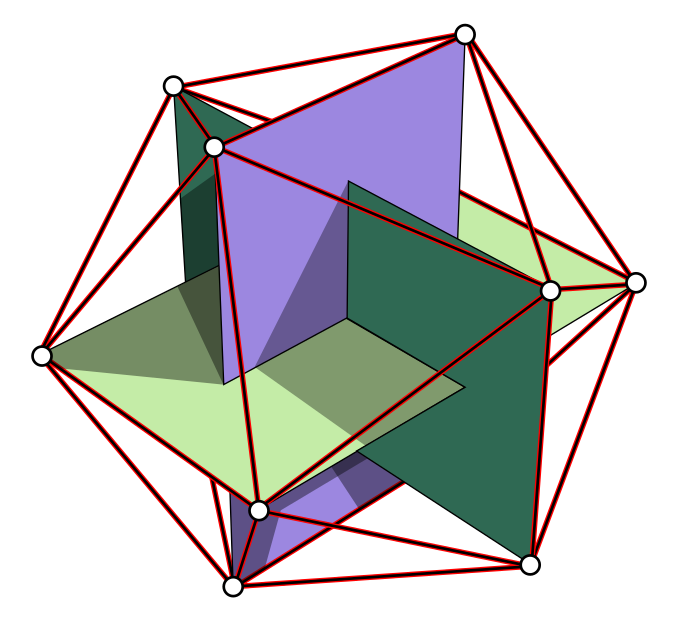
h3选择以正二十面体做为投影,通过把地球坐标映射到正二十面体的20个面上,然后再针对每个面做进一步的切分。正二十面体如下图所示:
 |
 |
正二十面体每个面都是一个等边三角形,映射之后,在地球这一球体上的映射如上图右所示。为方便理解,动态git图如下所示:
以上,可以注意到正二十面体,一共有12个顶点,每个顶点都是一个凸起,为了更好的模拟球面,可以对这个12个顶点进行截角处理,这样每个角被截后,就变成了一个正五边形。因此,地球被映射后,其实变成了20个正六边形+12个正五边形构成的近似球体。如下图所示,其实我们日常生活中常见到的足球正是这种形状的。

使用正六边形做网格
在地球被正二十面体,投影到20个面之后,就考虑每个面怎么做网格切分的问题。H3使用的是正六边形做层次网格。下面来看正三角形如何做六边形切分。
h3以上图这种形式进行,正六边形切分,专业术语称为(aperture=4)。每个面有4个完整的正六边形,同时还有3个不完整的正六边形。通过这个单面的分析,我们可以计算出,第0层,地球可以被切分为5.5X20=110个正六边形,然后再加上12个(共12个顶点)正五边形,一共122个网格。
需要注意的是,有些网格是跨越多个面的,同时有正五边形的存在。正五边形的存在会对整个网格的切分有一定的影响,如何消除正五边形的影响呢。
首先,需要明确的是随着正六边形不断的切分,正五边形的个数始终都是12个,同时这个正五边形的面积也是不断的减小,直到变成一个足够小的面积。
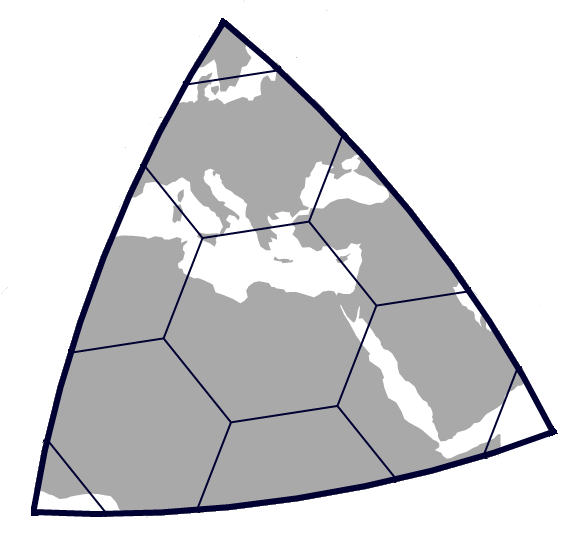
另外,可以通偏移,把12个顶点五边形放置到大海中(R. Buckminster Fuller提出的方案,把其中一个顶点放在11.25°E, 58.2825°N),从而避免对实际的陆地业务产生影响。
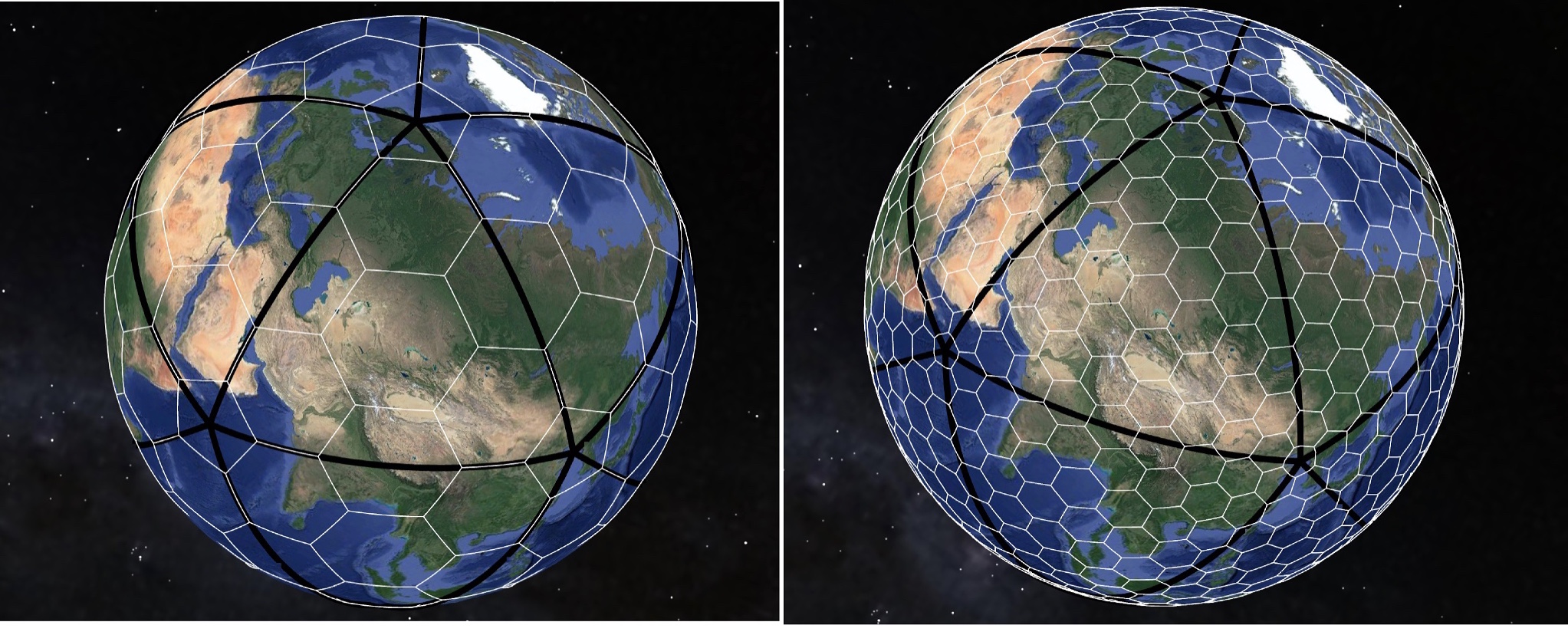
上图展示了,h3网格切分,左侧是level 0,右侧是level 1。可以很清楚的看到五边形越来越小,并且12个顶点都被巧妙的分布在了大海之上, 避免对实际的业务产生影响(轮船、快艇实际上可能受到影响)。
网格坐标系
关于如何标识一个网格,怎么定位呢?
H3使用了一种称为CoordIJK坐标系作为定位系统。
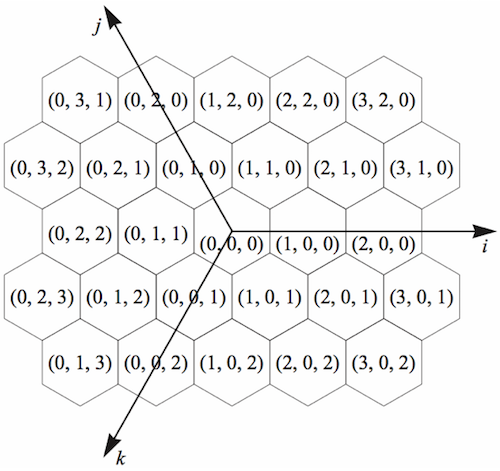
使用这种(i,j,k)三元组坐标,来为每个六边形网格编号。可以注意到两个坐标系之间的夹角是120°。比较类似于三维坐标系,不过这个是在二维平面上的。
H3使用FaceIJK坐标系,来表示二十面体不同面上的坐标。它是由面的编号(0~19)和对应的CoordIJK坐标构成。
随着网格的不断细分,ijk坐标系是有一定的偏转的,大概是19.1°。不过并不是一直往一个方向进行偏转,而是不断的左右偏转的。实际上不同的层,只有2种类型:
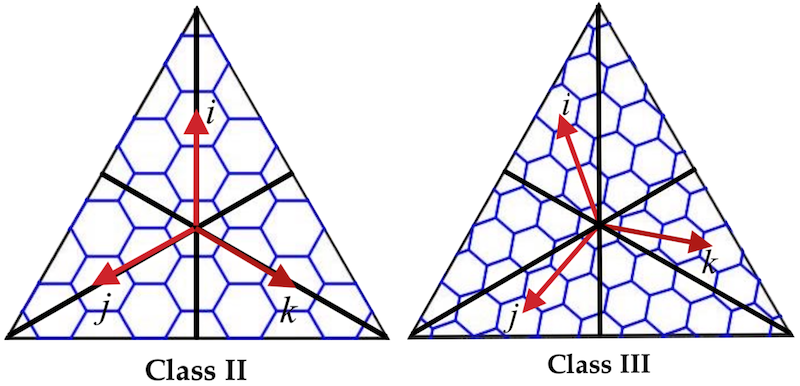
这里的Class II和Class III就是这2种类型,名字是R. Buckminster Fuller定义的专业术语。当然并不存在所谓的Class I,Class IV. 这里只是一种名字而已。针对base cell, 也就是0层的网格,他的类型就是Class II。
Hex2d坐标,是一个关联CoordIJK的笛卡尔坐标系。Hex2d的坐标原点与CoordIJK一样,x轴与与CoordIJK的I轴是对齐一致的。单位距离1.0的大小是CoordIJK两个相邻网格中心点之间的距离。
Hex2d在代码内是使用Vec2d来表示的。
Local IJ坐标,是用来摆脱不同面或者不同base cell限制的一个概念。这个坐标只有2个夹角为120°的轴,坐标原点也是和H3 Index一样。
Local IJ坐标只有在同一原点坐标下才具有可比性;Local IJ坐标,只在原点附近是有效的;Local IJ坐标有可能由于五边形的存在而导致的失真。同一个索引有可能有多个Local IJ坐标,原点也可能不是(0,0)。
LocalIJ坐标在代码内使用CoordIJ和一个关联的原始H3Index表示。
H3 Index 计算
H3为每一个网格生成一个唯一的标识。每层(resolution)的网格,都是从第0层计算出的基础网格编码(cell number)开始的。 基础网格编码是固定下来的的(0121),其余层次的坐标都是从这个基础网格编码来定位的。子网格的06分布,如下图所示:

从上可以看出,其实octal就是通过3bit的ijk坐标来算出来的。
由于有12个五边形,五边形是细分成6个子网格,并不是7个。所以直接把编号为1的网格给去掉了。
H3Index是一个64位的整形来表示的。它有3种类型:
- 1代表六边形网格
- 2 代表单向边(六边形A—>六边形B)
- 3 代表双向边(六边形A<—>六边形B)
H3Index实际上只使用了64位的低63位。具体格式如下图所示:
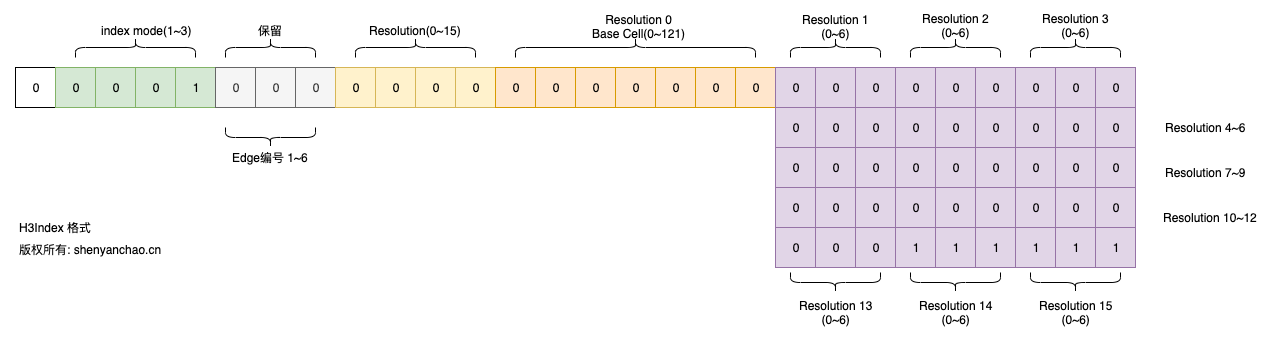
需要注意的是,如果Resolution没有到15层的话,那么置对应bit为全1,也就是7(111),标志没有使用到。
比如83001dfffffffff, 对应的二进制为:
1 | 0 0001 000 0011 0000000 000 011 101 |
所以,可以解读如下:
index mode=1索引的是正六边形类型;
Resolution层数=3;
Base Cell=0;
Resolution1的网格编号是0;
Resolution2的网格编号是3;
Resolution3的网格编号是5。
其余为是1,代表没有那么resolution。
H3 Resolution 范围误差
| H3 Resolution | 平均六边形面积 (平方千米) | 平均六边形边 (千米) | Number of unique indexes |
|---|---|---|---|
| 0 | 4,250,546.8477000 | 1,107.712591000 | 122 |
| 1 | 607,220.9782429 | 418.676005500 | 842 |
| 2 | 86,745.8540347 | 158.244655800 | 5,882 |
| 3 | 12,392.2648621 | 59.810857940 | 41,162 |
| 4 | 1,770.3235517 | 22.606379400 | 288,122 |
| 5 | 252.9033645 | 8.544408276 | 2,016,842 |
| 6 | 36.1290521 | 3.229482772 | 14,117,882 |
| 7 | 5.1612932 | 1.220629759 | 98,825,162 |
| 8 | 0.7373276 | 0.461354684 | 691,776,122 |
| 9 | 0.1053325 | 0.174375668 | 4,842,432,842 |
| 10 | 0.0150475 | 0.065907807 | 33,897,029,882 |
| 11 | 0.0021496 | 0.024910561 | 237,279,209,162 |
| 12 | 0.0003071 | 0.009415526 | 1,660,954,464,122 |
| 13 | 0.0000439 | 0.003559893 | 11,626,681,248,842 |
| 14 | 0.0000063 | 0.001348575 | 81,386,768,741,882 |
| 15 | 0.0000009 | 0.000509713 | 569,707,381,193,162 |
从上表可以知道,在Resolution=15的时候,平均面积已经在0.9平方米,边长也为0.5米了,完全满足常见的网格需求。
参考文档:
https://uber.github.io/h3/#/documentation/overview/introduction